Nameplate values stipulate the limits at which a motor or gearmotor can safely operate. To operate the motor either over or under the nameplate rated limit can degrade motor performance and safety. Let’s now review some of these restrictions and the consequences of ignoring them.
Tim Oliver, V.P. of Engineering • Bodine Electric Co.
Operating voltage: Don’t operate AC induction motors at voltages beyond ±10% of nameplate rating. Higher voltages produce detrimental motor temperature, noise and vibration, and operation of current-sensitive relays. Operating beyond rated voltages can also shorten motor life and capacitor life and could create nuisance operation of thermal overload protectors. On the other hand, voltages more than 10% below the nameplate rating can damage current-sensitive starting relays and cause delayed tripping of thermal overload protectors having internal heating coils — leaving windings exposed to temperatures exceeding maximum allowable limits.

Operating frequency: Don’t operate AC induction motors from a nominal power source frequency other than that specified on the nameplate. AC motor speed directly varies with the power source frequency. While it’s understandable that some OEM machines are designed to operate at more than one line frequency (including U.S. equipment exported to Europe) any decrease in speed arising from frequency reduction may cause detrimental temperatures and improper operation of centrifugal cutout switches (in split-phase motors) and relays. Increased frequencies reduce torque capability … and starting relays may fail to engage the auxiliary winding.
AC motor laminations (and the windings installed in them) are specifically designed for operation at nameplate frequencies. For example, the laminations for 60-Hz motors are considerably different than those used for 400-Hz motors. In addition, manufacturers of AC motors usually don’t performance-test their fixed-speed AC motors at frequencies other than the nameplate frequency rating. Because the amount and type of noise and vibration emanating from a motor will change directly with frequency, undesirable hum and other resonance effects are quite likely with deviations from nameplate frequencies.
Dual frequency (50/60 Hz) AC motors can be provided by most gearmotor manufacturers, usually at output ratings lower than the standard 60-Hz rating for a given frame size.
Nameplate torque ratings: Don’t operate any AC gearmotor or motor at torques in excess of nameplate rating. The rated torque can be calculated from the desired operating speed, torque, and motor power (in Watts or Horsepower). Overload limitations also apply to gearmotors where maximum gearhead torque is shown. Technical assistance should be requested from the manufacturer if overloads are anticipated. Operation at higher torque loads can result in lower speeds, higher winding temperatures, reduced life of windings, gears and bearings, and nuisance operation of thermal overload protectors. In many cases, overloads can create hazards to personnel. Noise and vibration also increase with excessive loading.
PSC gearmotors or motors at light loads: Use caution when operating permanent split capacitor (PSC) gearmotors or motors at light loads. An inherent characteristic of PSC AC induction motors is they generally operate at elevated temperatures when lightly loaded. While some motor manufacturers may take this condition into account as part of their design methodology, others may assume that the motor will always be operated at the nameplate load point. To prevent PSC motors from running too hot, they should be load matched to the application.
Ambient temperature rating: Don’t exceed a geared motor’s nameplate ambient temperature rating. Lack of air intake, ventilation obstructions, and other deviations from nameplate parameters will spur excessive motor temperatures. Operating at such elevated temperatures will shorten motor life and typically reduce available motor torque and speed. High temperatures may also spur nuisance operation of thermal overload protectors, and motor start failures where current-sensitive relays are employed. These hazards can be avoided by ensuring that the setting provides the motor with adequate ventilation.
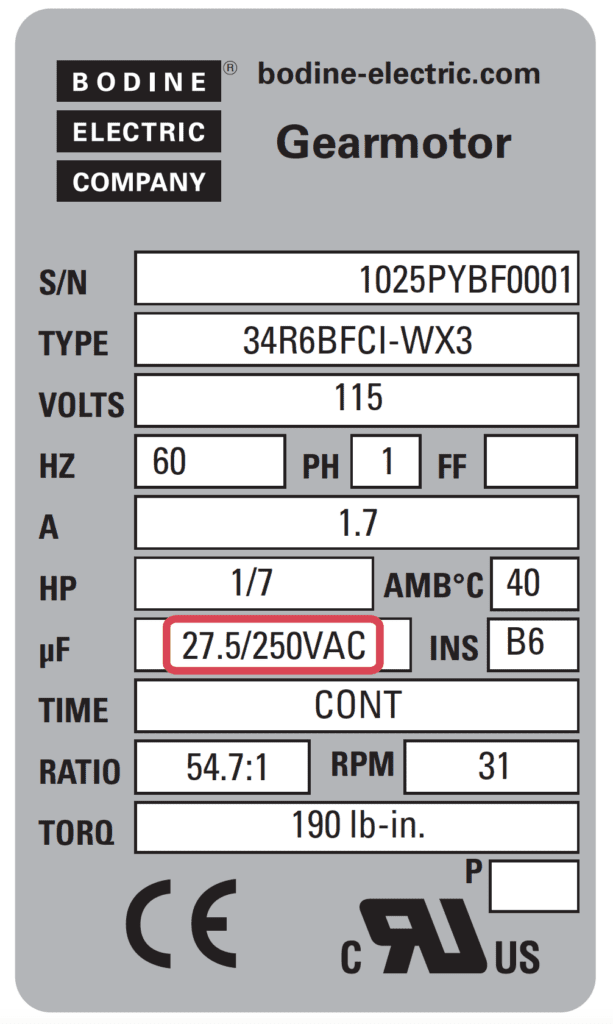
AC gearmotor/motor run and start capacitors: Don’t deviate from the specified capacitance of an AC gearmotor run capacitor for permanent split capacitor motors. In split-phase AC motors and gearmotors (with centrifugal start switch) motor-start capacitors are typically specified to reach maximum starting torque — and minimum locked rotor current deviations shouldn’t be made by the user. Changing to a higher value of capacitance will increase the starting torque and, in some cases, speed. It can also introduce hazards such as higher winding temperatures, shortened motor life, nuisance operation of thermal overload protectors, and increased noise and vibration. The voltage rating of the employed capacitor mustn’t be less than the value indicated on the AC motor nameplate.
Third-Party safety testing for OEM equipment by safety test laboratories (including UL, CSA, and Intertek) might fail thermal testing if the applied capacitor differs from the value specified on the motor nameplate. Always obtain assistance from the motor manufacturer when evaluating the proposed deviation and explore the possibility of changing the nameplate rating or developing a more satisfactory AC motor design.
Duty Cycle – Continuous versus Intermittent: Don’t subject the AC motor or gearmotor to duty cycles for which it was not designed. Continuous (CONT) or intermittent duty (S2 or S3 for example) as indicated on the gearmotor nameplate, identifies the designed mode of operation for the motor and is generally based on the motor’s insulation system class and the power (watts) that the motor must dissipate as heat when energized. Adverse effects can develop from operating a continuous-duty motor in an application needing frequent starts and stops … or from continuously operating an intermittent-duty motor.
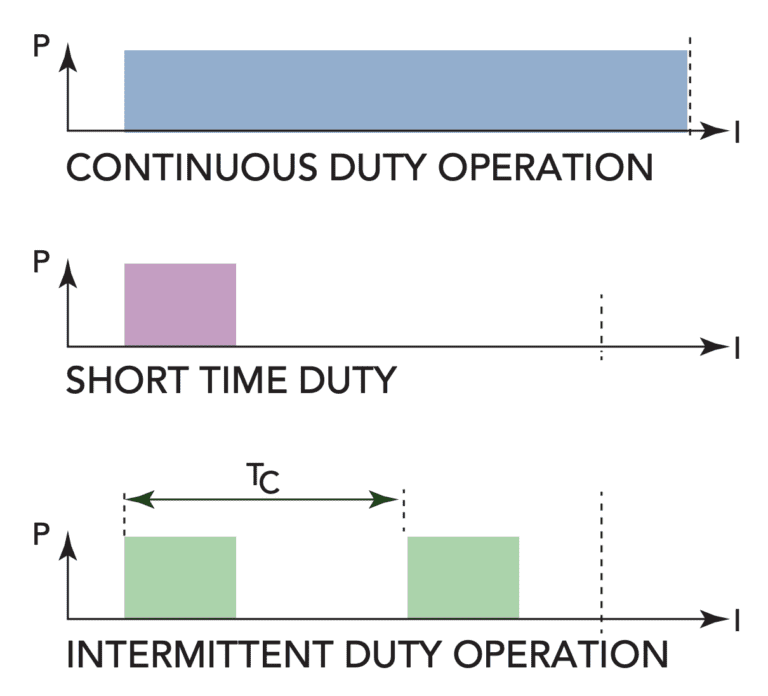
In general, deviating from the duty rating will spur higher winding temperatures with a shortened motor life and the possibility of nuisance operation of thermal overload protectors. Increased frequency of starts could spur failure of electrolytic motor start capacitors and a reduction in the life of motor starting switches or relays.
Note: Once the load magnitude is determined, the end user must identify or define the duty cycle as either continuous or intermittent. A gearmotor or motor that continues to operate after reaching normal operating temperature is considered to be operating under continuous-duty conditions. If a gearmotor or motor never reaches a steady temperature and is permitted to cool between operating cycles, then it’s operating under intermittent-duty conditions. Gearmotors or motors that are operated intermittently will be given a time rating that’s listed on the nameplate.
Released date: November 9, 2022
Source: www.bodine-electric.com